robot hand design


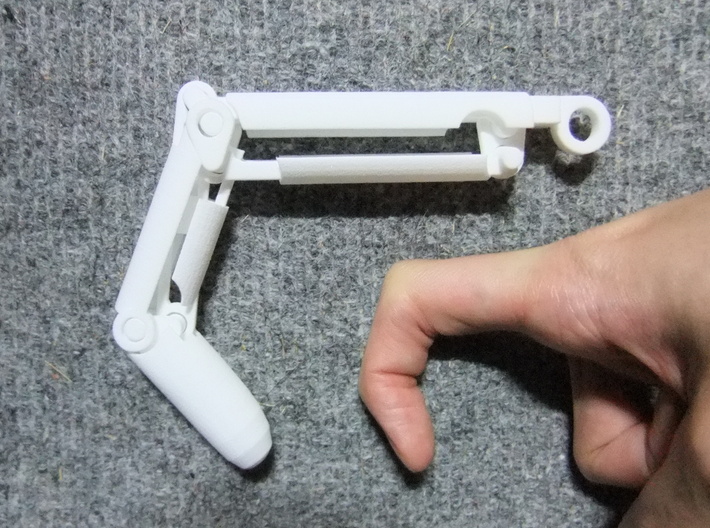


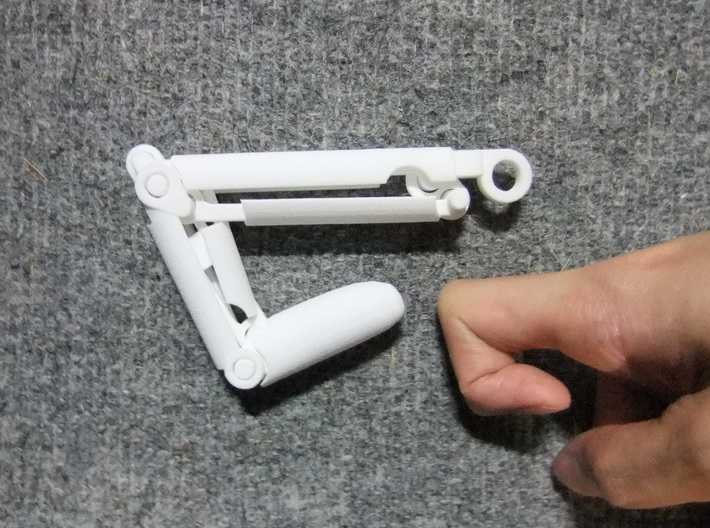
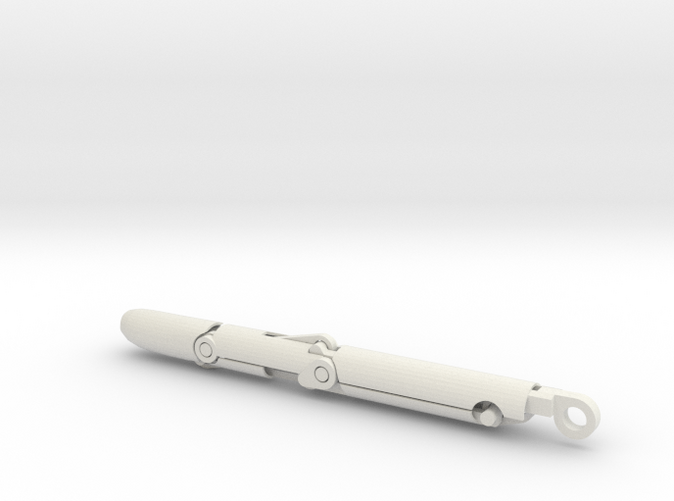
mechanical finger for robot hand , joints move lik
Made by
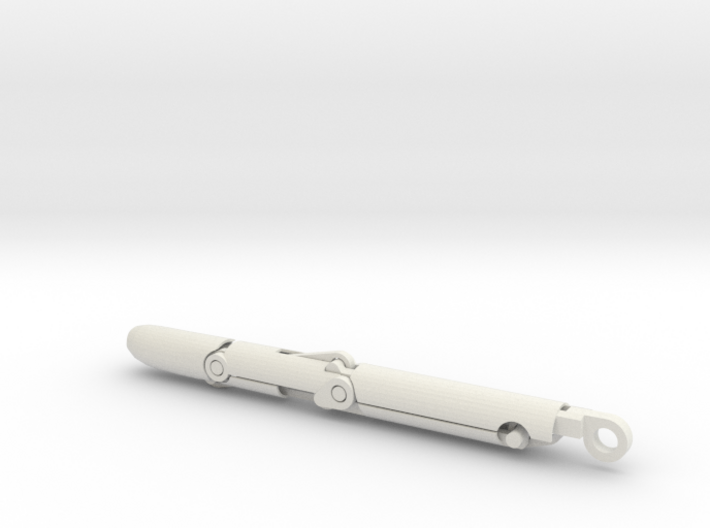
Print With Shapeways
 Choose Your Material
Choose Your Material
 Choose your color and finish
Choose your color and finish
$23.94
Have a question about this product?
contact the designerYou must be logged in and verified to contact the designer.
Product Description
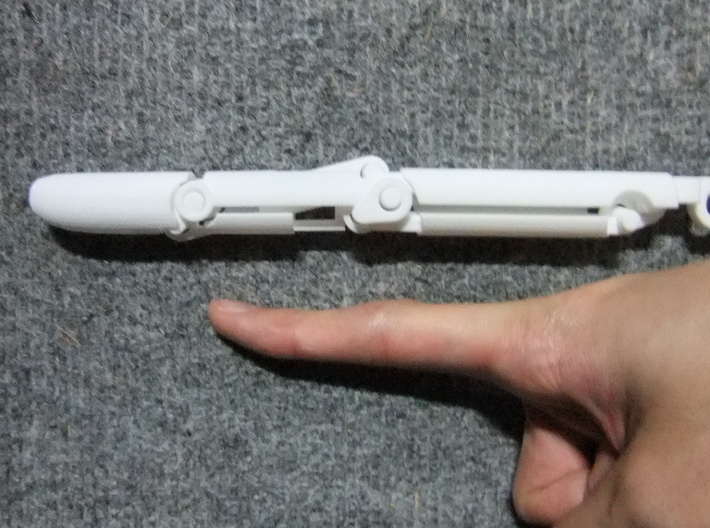
Robot finger (mechanical finger), two times as long as my index finger , has no holding force because it needs 0.5mm clearance between parts (so very loose...), this is trial product to test movement , (now I'm in the middle of modeling next finger , not loose cheap-version
robot hand design , finger mechanism
servo motor , stepper motor,
3D printing prosthetic hand test
Check my channel (https://www.youtube.com/channel/UCl5LhL6qgpoMwkBrK6uAr3g)
Request, Question (http://twitter.com/wata_works)
robot hand design , finger mechanism
servo motor , stepper motor,
3D printing prosthetic hand test
- Only Linkage
- You don't need WIRES to make fingers
Check my channel (https://www.youtube.com/channel/UCl5LhL6qgpoMwkBrK6uAr3g)
Request, Question (http://twitter.com/wata_works)

Details
What's in the box:
robot finger
Dimensions:
Success Rate:
First To try.
What's this?
Rating:
Mature audiences only.
More From This Shop

$10.39

{kind=link}

$10.03

$19.88